xtron机器人积木块编程指南¶
如果你想做一个机器人,你可以把Xtron当作机器人的大脑。当然,机器人不能只有大脑,我们需要给它配上一些传感器以及一些硬件模块。
Ovobot Xtron是Xtron的机器人扩展,它有一个4PIN接口,通过I2C总线连接Ovobot所有的传感器和硬件模块,还有一个包含了IO口、SPI、PWM和I2C功能的20PIN接口。
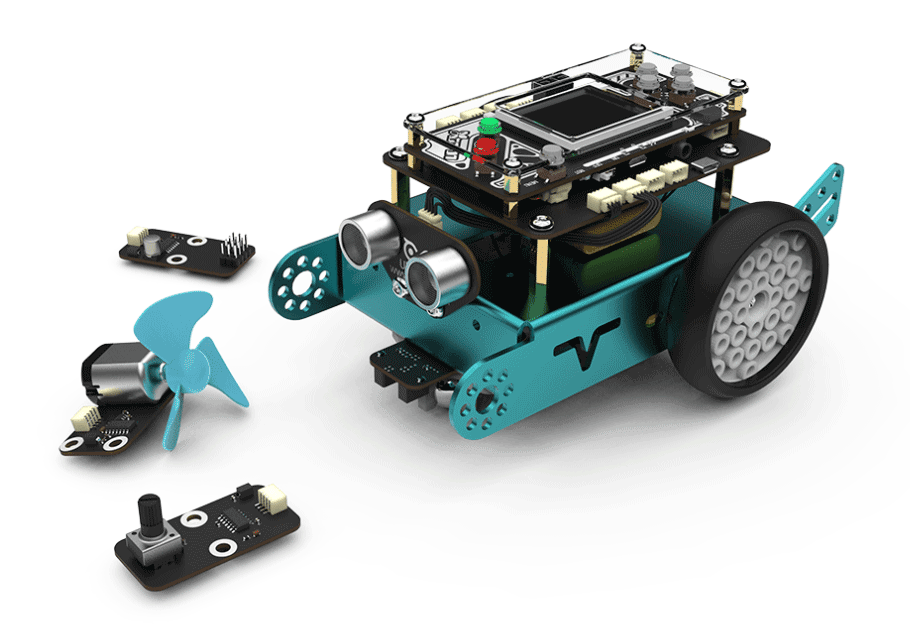
下面是Xtron的机器人扩展积木块,你可以用这些积木块来让机器人运动,声音传感器让机器人有了听力,超声波和巡线传感器则可以帮助机器人更好的完成一些任务。
1.设置机器人移动速度
该积木块用来设置机器人的前进或后退的速度,数值范围为0~255。
2.设置机器人移动速度及时间

和上面的积木块的区别是,上一个积木块需要加停止程序才可以让机器人停止运动。而这个积木块有持续时间,持续时间结束后,机器人就停止运动了。
3.设置旋转速度
设置机器人向左或者向右的旋转速度,速度范围为0~255。
4.设置旋转速度及时间

设置机器人向左或者向右的旋转速度以及持续时间,速度范围为0~255。区别同上。
5.停止运动

可以用该积木块让机器人停止运动。
6.驱动电机

该程序块可以分别设置机器人的左右两个轮子的速度,来实现前进,后退,转弯。
当左右转速相同,并且数值>0的时候,机器人按照设置速度前进。
当左右转速相同,并且数值<0的时候,机器人按照设置速度后退。
当左轮>0,右轮<0,机器人是左转。
当右轮>0,左轮<0,机器人是右转。
7.控制舵机转动
该积木块可以控制舵机旋转到一定的角度,旋转度数的范围大小是-90~90。可用来制作丰富的带舵机的小制作。
8.响度
我们用响度来表示声音传感器的反馈值,响度的范围大小是0~255。
9.超声波传感器距离

该积木块返回值是机器人的超声波传感器检测到离障碍物的距离。
10.超声波传感器检测到障碍物程序块

反馈机器人的超声波传感器是否检测到障碍物。是的话返回值是True, 否则返回值是False.
11.巡线传感器数值程序块

该积木块可以分别反馈巡线传感器左右两个光电对管检测的灰度值,黑色物体的返回值接近0,白色物体返回值接近255。
12.巡线传感器颜色检测程序块

分别用于判断巡线传感器左侧或者右侧是否检测到黑色或白色,条件成立时返回为真。